Los Angeles, February 2026. A content studio needed to know the G1’s exact weight before clearing it for an indoor shoot. We ran through the full spec sheet in a five-minute call. Shoot happened, no problems. We’ve had the same call dozens of times since.
Table of Contents
This post is the spec sheet, annotated. Every figure comes from Unitree’s published documentation, cross-referenced against what we’ve seen across actual deployments.
Flexibility Beyond Limits
Unitree G1 Key Specs at a Glance
What You Should Know
- Height: 1.27m. Width at shoulders: approximately 0.45m. Fits standard doorways and elevator cabs.
- Weight: 35kg. One person can move it with proper technique; two people is safer for stairs or vehicle loading.
- Battery: approximately 2 hours of continuous operation under active demo load. Swap windows needed for all-day deployments.
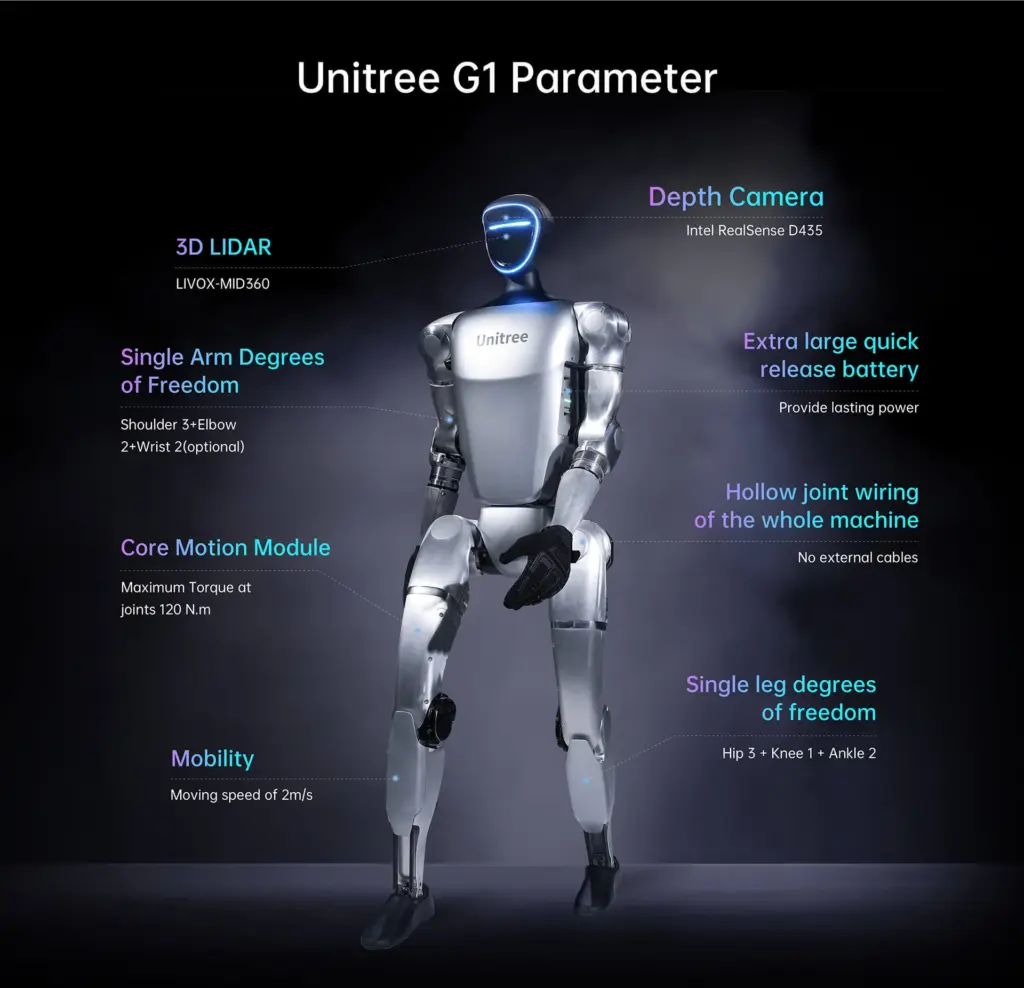
- Degrees of freedom: 41. Full-body coordination across legs, arms, torso, and hands.
- Compute: onboard Nvidia Jetson Orin — handles navigation, motion, and sensor processing without an external connection.
These five figures answer 90% of the pre-booking questions we receive. The rest of this post works through each spec category in more depth, with notes on what the numbers mean when the robot is actually in use.
All figures in this post come from Unitree’s official G1 specifications. Where our deployment experience diverges from the published figure, we note it explicitly.

Physical Dimensions and Weight
Standing height: 1.27m. This makes the G1 roughly the height of an average 10-year-old child — visually engaging, physically non-threatening, and able to make direct eye contact with seated adults.
Weight: 35kg. For comparison, a mid-size office printer. Not light, but two trained people handle loading and unloading without specialized equipment. Single-person operation is possible on flat surfaces; stairs or vehicle lifts are a two-person job.
Footprint: the G1’s foot spacing during a neutral stance is compact — roughly 0.3m between the outside edges of its feet. Walking gait widens slightly, but the robot comfortably navigates standard doorways (0.8m clear minimum), elevator cabs, and booth corridors at trade shows.
One spec that matters for indoor deployments: the G1 has no fixed boom arm or wide-reaching appendage. Its arms stay within the body’s shoulder width unless programmed otherwise. This matters for crowd environments where clearance is tight.
For deployments on polished concrete or slick flooring, traction pads are standard — we carry them on every shipment. The G1’s foot pads have moderate grip on carpet and moderate-to-good grip on matte tile. Polished marble and wet surfaces are the two conditions that consistently require mitigation.


Battery Life and Power Requirements
Published battery capacity: 9,000 mAh. Operational runtime: approximately 2 hours under continuous active demo load — walking, interacting, running programmed routines. Lighter use (static positioning, minimal movement) extends runtime; sustained high-movement sequences reduce it.
For all-day event deployments, plan on multiple charge windows. A standard 8-hour show day with the G1 in active demo mode requires 3 to 4 charge cycles. Charging takes roughly 45 minutes per cycle from a standard AC outlet. Build swap windows into your event schedule before the day starts.
The G1 charges from a standard AC outlet. No specialized power infrastructure required — one 15-amp outlet per robot is sufficient. The robot does not need to be connected to power during operation. For trade show and venue deployments, request a dedicated outlet for the charging station to avoid voltage drops during peak hours.
Battery management in practice: for full-day events, we advise rotating between two charge cycles — one robot runs while the other charges. For multi-day deployments, a daily morning charge and a midday top-up covers most 8-hour show schedules cleanly. See the humanoid robot for events post for the full logistics breakdown of battery planning.
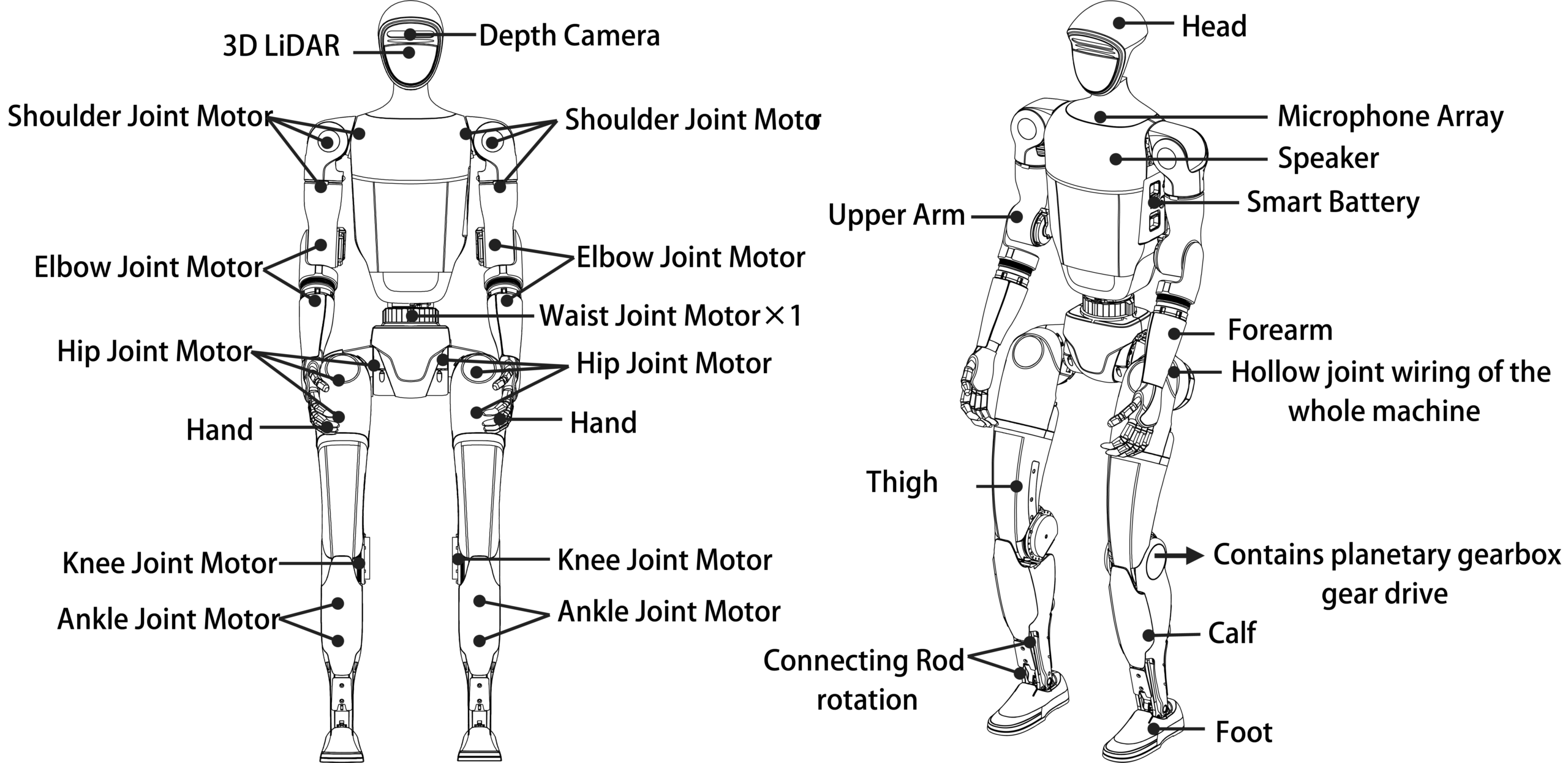
Movement: 41 Degrees of Freedom Explained
Degrees of freedom (DOF) is the count of independent joints that can move. At 41 DOF, the Unitree G1 has full-body coordination: legs, hips, torso, arms, wrists, and dexterous five-finger hands. For context, the human body has hundreds of DOF — 41 is a pragmatic engineering balance between expressiveness and mechanical reliability.
What 41 DOF enables in practice:
- Walking on flat and uneven terrain with active balance correction
- Picking up objects and handing them to people
- Holding positions for photos with stability
- Expressive gestures during interaction sequences
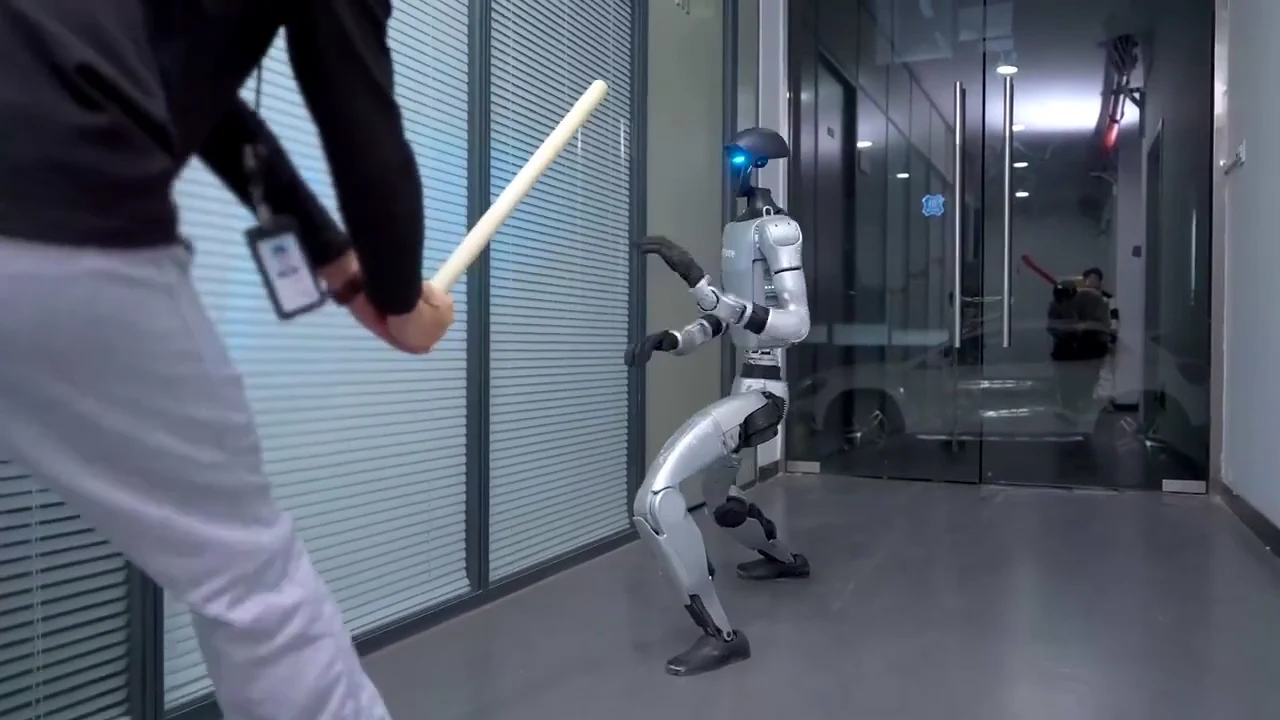
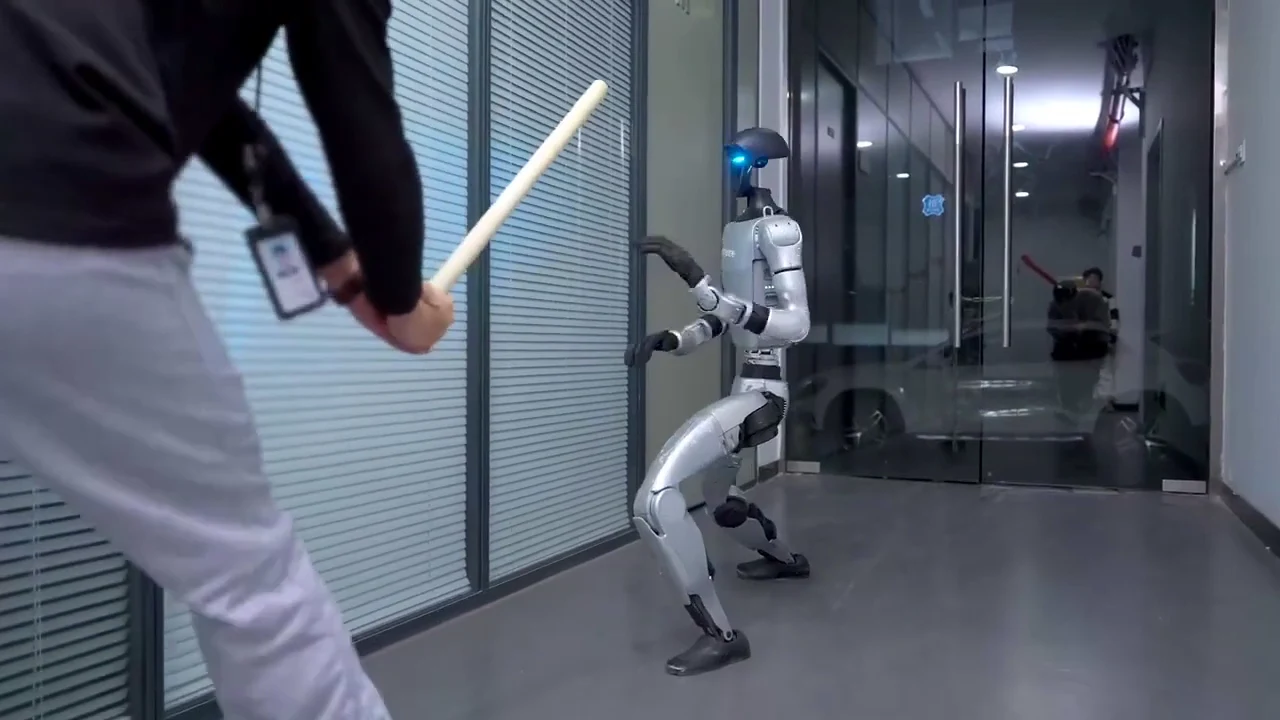
- Recovery from pushes or surface irregularities (the G1 can get back up from a fall)
What 41 DOF does not enable: fine manipulation of small objects, tasks requiring sustained precision grip, or movement in extremely tight spaces where the full arm extension would create clearance issues.
Maximum knee torque: 120 Nm. This gives the G1 the ability to handle inclines, carry moderate payloads (up to 3kg in each arm), and manage surface transitions without stopping. In event contexts, this translates to navigating carpet-to-tile transitions, ramps, and uneven stage flooring without manual assistance in most cases.
For a deeper look at how the G1’s movement compares to other humanoid robots currently available, IEEE Spectrum’s robotics coverage provides useful independent context. The walking mechanics specifically are covered in our post on why walking is the hardest thing a humanoid robot does.
Onboard Compute: What the G1 Runs On
The Unitree G1 runs on an Nvidia Jetson Orin 16G — 100 TOPS (tera-operations per second) of AI inference compute, onboard. This is not a tethered system. The robot processes navigation, balance, motion planning, and sensor inputs locally, without requiring a live cloud connection.
What this means for event deployments:
- Demo loops run autonomously without wifi — convention center network unreliability doesn’t stop the robot
- No latency from round-trip API calls during interaction sequences
- Remote operator override does require a stable connection, but the robot can continue pre-programmed routines independently
Sensor suite: the G1 includes depth cameras and IMU (inertial measurement unit) for spatial awareness. It moves around obstacles in real time and detects surface changes underfoot. In event environments, this helps the robot respond to people moving in front of it rather than stopping or colliding.
The Jetson Orin platform is the same compute architecture used across industrial and research robotics. It’s not a consumer-grade embedded system — it’s the same class of hardware used in autonomous vehicles and industrial inspection robots. For event contexts, this means the G1’s behavioral capabilities are constrained by programming and operator design, not by hardware limitations.
For a full breakdown of the hardware components that make up a robot like this, the inside a humanoid robot post covers what each system does. The G1’s compute performance in motion is also demonstrated in the Unitree G1 walking demo.
People Also Ask
What is the height of the Unitree G1?
The Unitree G1 stands 1.27 meters tall — approximately the height of an average 10-year-old. It fits standard doorways, elevator cabs, and trade show booth corridors without modification.
How much does the Unitree G1 weigh?
35 kilograms. Two people are recommended for loading into vehicles or carrying up stairs. On flat surfaces, one trained person can manage it. No specialized lifting equipment is required for standard venue access.
How long does the Unitree G1 battery last?
Approximately 2 hours under continuous active demo load, per Unitree’s specifications. Lighter use extends runtime. For full-day events, plan on multiple charge windows using a standard AC outlet.
How many degrees of freedom does the Unitree G1 have?
41 degrees of freedom — covering legs, hips, torso, arms, wrists, and five-finger dexterous hands. This enables full-body coordination, object handling, and expressive gestures during interaction sequences.
What computer does the Unitree G1 use?
The G1 runs on an Nvidia Jetson Orin 16G with 100 TOPS of onboard AI compute. All navigation, balance, and motion processing happens locally — no cloud connection required for autonomous operation.
What floor surfaces does the Unitree G1 handle?
Carpet and flat concrete reliably. Polished concrete requires traction pads, which are standard on every rental. Wet surfaces and loose mats need advance review. The G1 handles moderate ramps and carpet-to-tile transitions without manual assistance in most cases.
Can the Unitree G1 pick up and hold objects?
Yes. The G1 has BrainCo Revo 2 dexterous hands — five fingers with independent actuation — and can carry up to 3kg per arm. Common event uses include handing branded items to attendees, holding props for photo moments, and pressing buttons or operating simple displays.
The Bottom Line
The Unitree G1 is a 1.27m, 35kg humanoid robot with 41 degrees of freedom, 2-hour operational battery, and full onboard compute — no cloud connection needed for autonomous operation. Those are the specs that drive most deployment decisions.
In practice, the figures that come up most during event planning are battery runtime (plan for charge windows), weight (two-person load for stairs), and height (clears standard doorways). The compute and DOF specs matter for what the robot can actually do on the floor — which is more than most people expect from a first-time deployment.
For rental availability, regional pricing, and how to start a booking, the Unitree G1 humanoid robot page has current information.